پادشاهِ کُدنویسا شو!

وقتی صحبت از توسعه نرمافزارهای سازمانی، صنعتی و دسکتاپ به میان میآید، اکوسیستم .NET و زبان #C به دلیل پایداری بالا، مدیریت حافظه بهینه و معماری شیءگرا، انتخاب اول بسیاری از مهندسان نرمافزار است. اما چطور میتوان قدرت زبان #C را با ابزارهای پیشرفته بینایی ماشین گره زد؟ پاسخ در یک کتابخانه افسانهای به نام OpenCV و مشتقات داتنتی آن نهفته است.
در این مقاله تخصصی، ابتدا به کالبدشکافی چیستی OpenCV و معماری آن میپردازیم و سپس نحوه پیادهسازی یک خط لوله (Pipeline) پردازش تصویر بلادرنگ را در محیط #C با تکیه بر اصول معماری تمیز و مدیریت بهینه حافظه بررسی خواهیم کرد.
OpenCV مخفف Open Source Computer Vision Library، یک کتابخانه متنباز و فوقالعاده قدرتمند برای بینایی ماشین و یادگیری ماشین است. این پروژه ابتدا در سال ۱۹۹۹ توسط کمپانی Intel پایهگذاری شد و بعدها توسط Willow Garage و Itseez (که توسط اینتل خریداری شد) توسعه یافت. امروزه یک بنیاد غیرانتفاعی مسئولیت نگهداری و بهروزرسانی آن را بر عهده دارد.
چرا OpenCV اینقدر محبوب و سریع است؟
OpenCV هسته اصلی خود را با زبانهای C و C++ نوشته است. این انتخاب زبان تصادفی نیست؛ پردازش تصویر یعنی دستکاری ماتریسهای عظیمی از اعداد (پیکسلها) در کسری از میلیثانیه. C++ به OpenCV این امکان را میدهد که مستقیماً با حافظه رم و پردازنده تعامل داشته باشد.
علاوه بر این، OpenCV از ویژگیهای زیر برای به حداکثر رساندن سرعت استفاده میکند:
پشتیبانی از Multi-threading: تقسیم بار پردازش ماتریسها روی هستههای مختلف CPU.
بهینهسازی با SIMD (مانند AVX/SSE): اجرای یک دستور روی چندین داده به صورت همزمان در سطح سختافزار.
شتابدهی گرافیکی (OpenCL/CUDA): انتقال بارهای سنگین پردازشی به پردازنده گرافیکی (GPU) برای پردازشهای فوقسریع یا مفسرهای هوش مصنوعی.
ماژولهای اصلی OpenCV
OpenCV از چندین ماژول تفکیکشده تشکیل شده است که هرکدام وظیفه خاصی دارند:
Core: ساختارهای داده پایهای مانند ماتریس دو بعدی Mat (که قلب OpenCV است) و عملیات ریاضی روی آنها را مدیریت میکند.
Imgproc (Image Processing): شامل فیلترهای تصویر (Blur, Edge Detection)، تغییر سایز، تبدیلهای رنگی (مانند RGB به خاکستری) و هیروگرافی است.
Video: ابزارهای تحلیل حرکت، تعقیب شیء (Object Tracking) و حذف پسزمینه.
Objdetect: تشخیص اشیاء از پیش تعریف شده مانند چهره، چشم، خودرو و غیره با استفاده از روشهای سنتی (Haar Cascades) یا مدرن.
DNN (Deep Neural Networks): ماژولی حیاتی که اجازه میدهد مدلهای یادگیری عمیقِ آموزشدیده در فریمورکهای محبوب (مثل TensorFlow، PyTorch و YOLO) را بارگذاری و با سرعت بالا اجرا کنید.
از آنجا که OpenCV به زبان C++ نوشته شده است، نمیتوان آن را به صورت بومی (Native) در داتنت فراخوانی کرد. برای حل این مشکل، ما نیازمند یک Wrapper (پوششدهنده) هستیم که کدهای Managed داتنت را به کدهای Unmanaged سیپلاسپلاس متصل کند (از طریق مکانیزم P/Invoke).
دو Wrapper قدرتمند و محبوب در دنیای داتنت برای این کار وجود دارد:
۱. Emgu CV
۲. OpenCvSharp
این کتابخانه در سالهای اخیر به انتخاب اول مهندسان داتنت تبدیل شده است. OpenCvSharp یک نگاشت مستقیم (Direct Mapping) و یکبهیک از توابع C++ به #C ارائه میدهد. ساختار متدهای آن دقیقاً ساختار نیتیو OpenCV را حفظ میکند؛ به همین دلیل، مستندات رسمی OpenCV کاملاً روی آن قابل انطباق هستند. سرعت بالاتر و مدیریت حافظه شفافتر، از مزایای اصلی OpenCvSharp است. در ادامه این مقاله، ما از این کتابخانه استفاده خواهیم کرد.
بزرگترین چالش در زمان ادغام داتنت با OpenCV، مسئله مدیریت حافظه است.
زبان #C از مکانیزم Garbage Collector (GC) برای مدیریت حافظه الگوبرداری میکند. GC کنترل حافظه Managed (هک یا Heap داتنت) را بر عهده دارد. اما ماتریسهای تصویر OpenCV (شیء Mat) در حافظه Unmanaged (خارج از قلمرو GC) ذخیره میشوند.
یک تصویر با کیفیت Full HD (1920x1080) با فرمت رنگیBGR، در هر فریم حدود ۶ مگابایت از حافظه رم را اشغال میکند. اگر دوربین شما با نرخ ۳۰ فریم در ثانیه کار کند، یعنی در هر ثانیه ۱۸۰ مگابایت داده وارد حافظه میشود!
هشدار مهندسی: اگر در حلقه پردازش تصویر بلادرنگ، اشیاء Mat را به صورت دستی آزاد نکنید، اشیاء Managed کوچک (توابع #C) توسط GC جمعآوری میشوند اما حافظه عظیم Unmanaged (کدهای C++) در رم باقی میماند. این پدیده منجر به Memory Leak (نشت حافظه) شدید شده و برنامه شما ظرف چند دقیقه کرش خواهد کرد.
راهکار تخصصی: الگوی IDisposable و بلوکهای using
در #C، هر زمان با ساختارهای OpenCvSharp (مانند Mat، VideoCapture، CascadeClassifier) کار میکنید، باید حتماً مطمئن شوید که متد .Dispose() آنها فراخوانی میشود. بهترین و تمیزترین روش، استفاده از دستور using است:
// نمونهای از آزادسازی خودکار حافظه Unmanaged
using (Mat frame = new Mat())
{
// انجام پردازش روی فریم
} // در این نقطه، حافظه فریم فوراً آزاد میشود
برای این که کد ما فراتر از یک اسکریپت ساده باشد و قابلیت نگهداری (Maintainability) و تستپذیری (Testability) داشته باشد، باید پردازش تصویر را کاملاً از لایه UI (مثلاً WPF یا MAUI) یا لایههای ارتباطی جدا کنیم.
یک خط لوله (Pipeline) استاندارد بلادرنگ شامل بخشهای زیر است:
[Camera/Video Source] ──> [Capture Engine] ──> [Processing Pipeline] ──> [UI / Action Dispatcher]
Capture Engine: وظیفه اتصال به سختافزار (دوربین یا RTSP Stream) و واکشی فریمها به صورت آسنکرون را دارد.
Processing Pipeline: لایهای خالص حاوی الگوریتمهای پردازش تصویر (بدون وابستگی به این که تصویر از کجا آمده یا کجا نمایش داده میشود).
UI/Action Dispatcher: لایهای که نتایج پردازش شده را نمایش میدهد یا رویداد خاصی (مثلاً آلارم تشخیص حرکت) را فعال میکند.
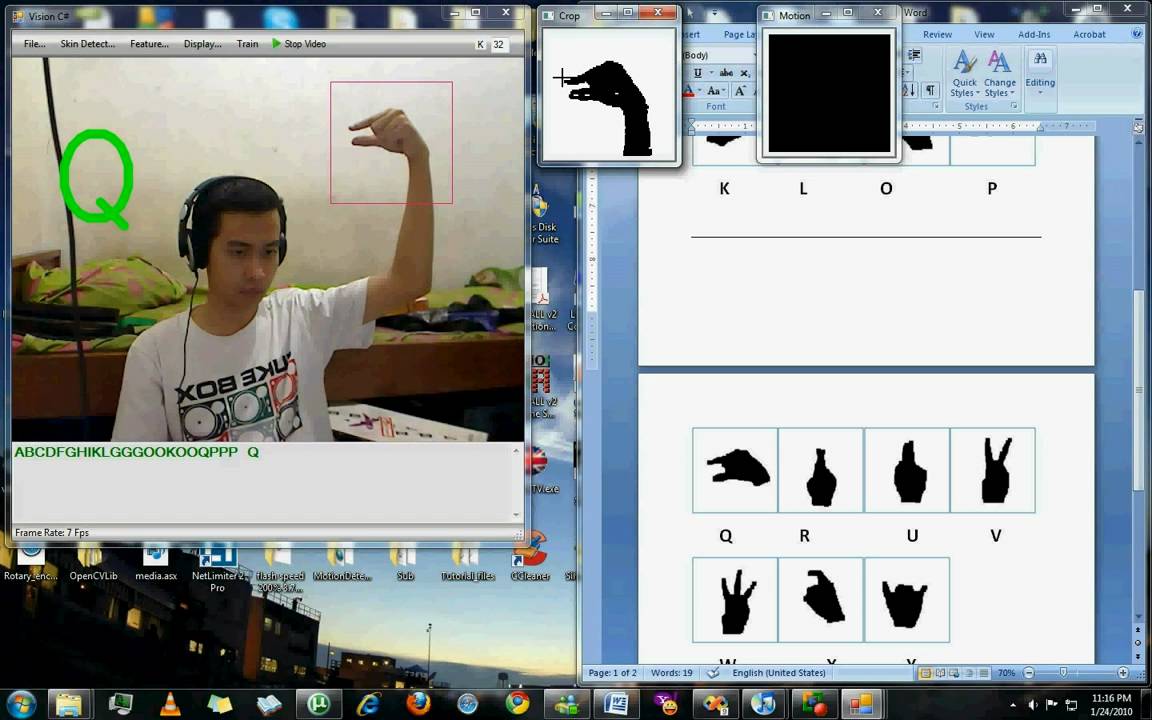
در این بخش، یک پروژه واقعی پردازش تصویر بلادرنگ را پیادهسازی میکنیم. سناریوی ما: دریافت ویدیو از وبکم، تبدیل فریمها به مقیاس خاکستری (Grayscale)، اعمال فیلتر گوسی برای کاهش نویز، لبهیابی تصویر (Canny Edge Detection) و نمایش نرخ فریم واقعی (Actual FPS) روی ویدیو.
۱. راهاندازی پروژه
ابتدا یک پروژه از نوع NET 8.0. Console یا WPF ایجاد کنید و پکیجهای ناگت زیر را نصب نمایید:
dotnet add package OpenCvSharp4
dotnet add package OpenCvSharp4.runtime.win # یا پکیج متناسب با لینوکس/مک
۲. پیادهسازی کلاس اصلی پردازشگر
در این کد، تمام الگوهای بهینه مدیریت حافظه و پردازش فریمبه-فریم پیادهسازی شده است:
using System;
using System.Diagnostics;
using System.Threading;
using OpenCvSharp;
namespace RealTimeImageProcessing
```csharp
public class VideoProcessor
{
private readonly int _cameraId;
private bool _isRunning;
public VideoProcessor(int cameraId = 0)
{
_cameraId = cameraId;
}
public void StartPipeline()
{
_isRunning = true;
// 1. اتصال به دوربین (Video Source)
using var capture = new VideoCapture(_cameraId);
if (!capture.IsOpened())
{
Console.WriteLine("خطا: امکان دسترسی به دوربین وجود ندارد.");
return;
}
// تنظیم رزولوشن تصویر ورودی جهت بهینهسازی سرعت
capture.Set(VideoCaptureProperties.FrameWidth, 640);
capture.Set(VideoCaptureProperties.FrameHeight, 480);
// تخصیص ماتریسها خارج از حلقه اصلی جهت جلوگیری از بازتخصیص مداوم حافظه (Allocation Garbage)
using var rawFrame = new Mat();
using var grayFrame = new Mat();
using var blurredFrame = new Mat();
using var edgeFrame = new Mat();
var stopwatch = new Stopwatch();
Console.WriteLine("پردازش بلادرنگ آغاز شد. کلید ESC را برای خروج فشار دهید...");
while (_isRunning)
{
stopwatch.Restart();
// 2. واکشی فریم جاری از دیسک/سختافزار
capture.Read(rawFrame);
if (rawFrame.IsEmpty()) continue;
// 3. اجرای خط لوله پردازش تصویر (Pipeline)
// الف) تبدیل به حالت خاکستری: حجم داده را به یکسوم کاهش میدهد (حذف کانالهای رنگی اضافی)
Cv2.CvtColor(rawFrame, grayFrame, ColorConversionCodes.BGR2GRAY);
// ب) اعمال فیلتر مات گوسی: کاهش نویزهای فرکانس بالا در تصویر
Cv2.GaussianBlur(grayFrame, blurredFrame, new Size(5, 5), 1.5);
// ج) الگوریتم لبهیابی کنی (Canny Edge Detection)
Cv2.Canny(blurredFrame, edgeFrame, 50, 150);
stopwatch.Stop();
// 4. محاسبه و نمایش نرخ فریم (FPS)
double fps = 1.0 / stopwatch.Elapsed.TotalSeconds;
string fpsText = $"FPS: {fps:F2}";
// ترسیم متن نرخ فریم روی فریم اصلی خروجی
Cv2.PutText(edgeFrame, fpsText, new Point(10, 30),
HersheyFonts.HersheySimplex, 1.0, Scalar.White, 2);
// 5. لایه نمایش (UI Rendering)
Cv2.ImShow("Raw Camera Feed", rawFrame);
Cv2.ImShow("Real-Time Edge Detection Pipeline", edgeFrame);
// کنترل حلقه خروج: گوش به زنگ بودن برای فشردن کلید (تأخیر ۱ میلیثانیهای برای حفظ ریتم فریمها)
int key = Cv2.WaitKey(1);
if (key == 27) // 27 کد اسکی کلید Escape است
{
_isRunning = false;
}
}
// بستن تمامی پنجرههای گرافیکی OpenCV
Cv2.DestroyAllWindows();
}
public void StopPipeline()
{
_isRunning = false;
}
}
۳. نقطه ورود برنامه (Main)
class Program
{
static void Main(string[] args)
{
// ایجاد نمونه از پردازشگر و اجرای لایه بلادرنگ
var processor = new VideoProcessor(cameraId: 0);
processor.StartPipeline();
}
}
بخش ششم: تحلیل فنی کدهای خط لوله پردازش
بیایید جزئیات فنی توابعی که در خط لوله بالا استفاده کردیم را بررسی کنیم تا درک عمیقتری از ریاضیات پشت پرده آنها پیدا کنیم:
ماتریس Mat چیست؟
هر تصویر دیجیتال آرایهای دو بعدی از پیکسلهاست. در OpenCvSharp، شیء Mat نماینده این ماتریس است. وقتی تصویر خاکستری است، ماتریس ما ۲ بعدی (عرض × طول) است و هر سلول شامل یک عدد بین ۰ (سیاه مطلق) تا ۲۵۵ (سفید مطلق) است. وقتی تصویر رنگی BGR است، ماتریس ما دارای یک بعد سوم نیز هست (کانالهای رنگی آبی، سبز، قرمز).
فیلتر گوسی (Gaussian Blur)
تصاویر دوربینهای دیجیتال همیشه حاوی نویزهای ریز (مانند برفک) هستند. اگر لبهیابی را مستقیماً روی تصویر نایزدار اجرا کنیم، الگوریتم نویزها را به عنوان لبه تشخیص میدهد. فیلتر گوسی با اعمال یک ماتریس هسته (Kernel) کوچک روی تصویر (مثلاً ۵ در ۵ پیکسلی) و محاسبه میانگین وزندار همسایگی هر پیکسل بر اساس توزیع نرمال گوسی، تصویر را کمی تار کرده و نویزهای فرکانس بالا را حذف میکند.
الگوریتم لبهیابی کنی (Canny Edge Detection)
این الگوریتم که توسط جان اف. کنی در سال ۱۹۸۶ ابداع شد، هنوز یکی از شاهکارهای بینایی ماشین سنتی است. این الگوریتم تغییرات ناگهانی شدت روشنایی (گرادیان) را در تصویر پیدا میکند. نقاطی که در آنها رنگ به طور ناگهانی از روشن به تاریک تغییر میکند، به عنوان «لبه» علامتگذاری میشوند. پارامترهای 50 و 150 در متد بالا، آستانههای بالا و پایین (Hysteresis Thresholding) برای تایید نهایی لبهها هستند.
بخش هفتم: تکنیکهای پیشرفته برای بهینهسازی عملکرد (Optimization)
اگر قصد دارید سیستم خود را در مقیاس صنعتی یا دوربینهای با کیفیت 4K پیادهسازی کنید، اعمال زیر برای حفظ ماهیت بلادرنگ (Real-time) ضروری است:
۱. تکنیک عدم تخصیص مجدد حافظه (Avoid Re-allocation)
در کدی که بالاتر نوشتم، به این نکته دقت کنید:
using var rawFrame = new Mat();
این متغیرها خارج از حلقه while تعریف شدهاند. در داخل حلقه، متد capture.Read(rawFrame) حافظه قبلی را پاک نمیکند، بلکه دادههای فریم جدید را روی همان خانههای حافظه قبلی Overwrite میکند. اگر این تعریف را داخل حلقه ببرید، سیستم در هر ثانیه ۳۰ بار حافظه جدید تخصیص میدهد و این کار باعث سربار شدید پردازنده خواهد شد.
۲. چندنخی مایل به موازیسازی (Task-Based Asynchrony)
واکشی فریم از دوربین (IO-Bound) و پردازش فریم (CPU-Bound) نباید روی یک نخ (Thread) مشترک اجرا شوند. در سیستمهای پیشرفته، یک نخ وظیفه دارد فقط فریمها را از دوربین بگیرد و در یک صف امن (ConcurrentQueue) بریزد. نخ یا نخهای دیگر به صورت موازی فریمها را از صف برداشته و پردازش میکنند.
۳. پردازش موازی پیکسلها با Parallel.For
اگر در پروژهتان نیاز دارید خودتان به صورت دستی روی تکتک پیکسلهای یک فریم حلقه بنویسید و محاسباتی انجام دهید، هرگز از حلقههای معمولی for استفاده نکنید. به جای آن از ویژگی شتابدهنده داتنت یعنی Parallel.For استفاده کنید تا فریم به چند بخش تقسیم شده و هستههای مختلف CPU همزمان کار پردازش پیکسلها را انجام دهند.
نتیجهگیری
کتابخانه OpenCV به عنوان موتور محرک بینایی ماشین، وقتی با قدرت ساختاری و مدرن زبان #C و فریمورک داتنت ترکیب میشود، پلتفرمی بینظیر برای توسعه نرمافزارهای تجاری، صنعتی و پزشکی پدید میآورد.
در این مقاله آموختیم که پردازش تصویر بلادرنگ چیست، چگونه معماری OpenCvSharp به کدهای نیتیو متصل میشود و چطور باید چالشهای بزرگ مدیریت حافظه و نشت حافظه (Memory Leak) را با استفاده صحیح از لایههای مدیریت شده و الگوی using برطرف کرد. با اتکا به این مفاهیم و جدا نگهداشتن لایههای پردازشی از پوسته ظاهری نرمافزار، توسعه سیستمهای هوشمند بینایی ماشین در داتنت، بسیار لذتبخش، پایدار و پرسرعت خواهد بود.















0 نظر
هنوز نظری برای این مقاله ثبت نشده است.